Articles
-
Ethereal Microcosm: process and inspirations
 Published on
Published on
-
Deposited-Substrate as Communication Layer (DS-CL)
 Published on
Published on
-
Dividing-Aggregating Walkers
 Published on
Published on
-
Localized Attraction-Repulsion (LAR)
 Published on
Published on
-
Cyclic Diffusion-Limited Aggregation
 Published on
Published on
-
Atomic Clusters, a molecular particle-based simulation
 Published on
Published on
-
Pixel sorting on shader using well-crafted vector fields, GLSL
 Published on
Published on
-
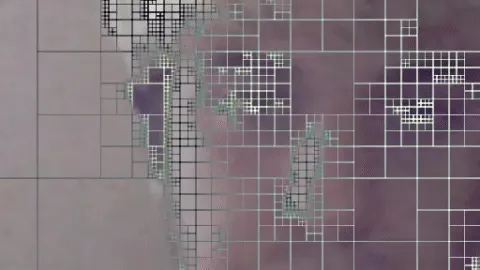
Building a quadtree filter in GLSL, using a probabilistic approach
 Published on
Published on
-
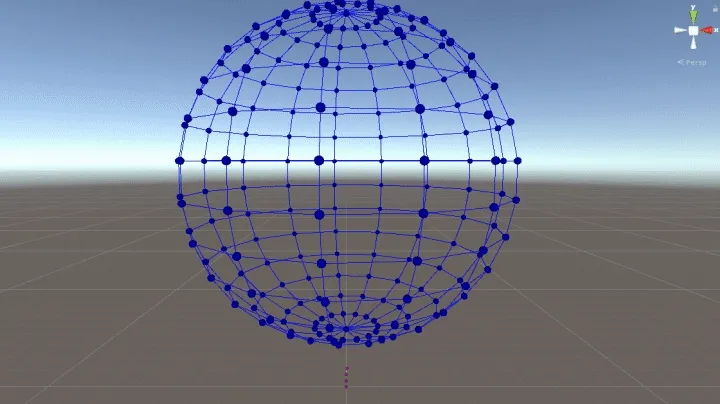
Generating a 3D growing tree using a space colonization algorithm
 Published on
Published on
-
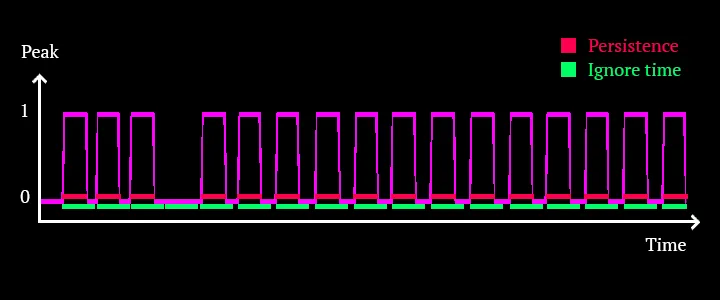
Audio analysis for advanced music visualization pt.1
 Published on
Published on